

Ponte en Contacto
Bienvenido a discutir sus requisitos de compra con nuestro servicio de atención al cliente.
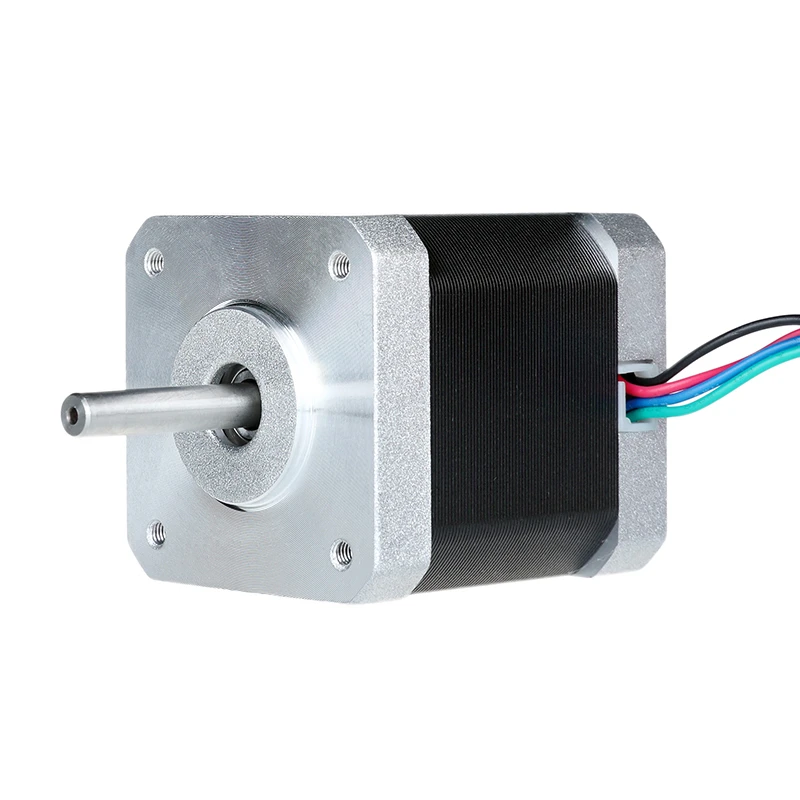
Stepper motor is a brushless, synchronous electric motor that converts digital pulses into mechanical shaft rotation. Its normal shaft motion consists of discrete angular movements of essentially uniform magnitude when driven from sequentially switched DC power supply. Stepper motor is a digital input-output device. It is particularly well suited to the type of application where control signals appear as digital pulses rather than analog voltages. One digital pulse to a stepper motor drive or translator causes the motor to increment one precise angle of motion. As the digital pulses increase in frequency, the step movement changes into continuous rotation. Some industrial and scientific applications of stepper motors include robotics, machine tools, pick and place machines, automated wire cutting and wire bonding machines, and even precise fluid control devices.
Every revolution of the Nema34 stepper motor is divided into a discrete number of steps, in many cases 200 steps, and the motor must be sent a separate pulse for each step. The stepper motor can only take one step at a time and each step is the same size.
Since each pulse causes the motor to rotate a precise angle, typically 1.8°, the motor’s position can be controlled without any feedback mechanism. As the digital pulses increase in frequency, the step movement changes into continuous rotation, with the speed of rotation directly proportional to the frequency of the pulses.
Stepper motors are used every day in both industrial and commercial applications because of their low cost, high reliability, high torque at low speeds and a simple, rugged construction that operates in almost any environment.
If we examine the construction of the stepper motor, we will see that there is no friction in the moving parts except this bearing, so this is the reason the Nema34 stepper motor survives for a long time. But again, motor use matters. The life of any motor depends on how we use the motor. More rigorous use of the motor can affect the life of the motor.
Holding Torque of any motor is a really important parameter. It should be as high as possible.
Holding Torque is the motor’s ability to maintain its original position after energizing the motor windings, even when a large amount of force is applied to the shaft of the motor.
It is also known as the stand stall torque of the motor. On top of this, the stepper motor has another capability that keeps the rotor in the same position when no current flows through the winding and this is called the Detent Torque of the motor.
Unike other motors, this type of motor will not increase your expenses on maintenance costs and the reason for this is that the stepper motor is a brushless type of motor. Unlike other motors, in this motors, you do not need to change the brush repeatedly. And so we can say that the this type of motor has a low maintenance cost.
Esta es una de las mejores características del motor paso a paso. El motor paso a paso tiene la capacidad de retornar a su posición original después de completar un desvío completo. Esta característica de este tipo de motores los hace más precisos y los motores más útiles en aplicaciones donde la velocidad precisa es la prioridad.
Los motores paso a paso producen un alto torque a baja velocidad. Esto los hace más adecuados para aplicaciones donde se requiere un alto torque con alta precisión.
Si estás buscando un motor que controle el objeto con más precisión, entonces esta es la mejor opción para ti. Como discutimos, el motor paso a paso opera en un sistema de bucle abierto, lo que significa que, a diferencia de otros motores, el motor paso a paso no requiere un codificador y esto hace que el motor paso a paso sea menos complejo y más económico que otros motores.
La elección de un motor paso a paso depende de los requisitos de torque y velocidad de la aplicación. Usa la curva de torque-velocidad del motor (que se encuentra en las especificaciones de cada controlador) para seleccionar un motor que realice el trabajo. Cada controlador de motor paso a paso en la línea de Omegamation muestra las curvas de torque-velocidad para los motores recomendados de ese controlador. Si tus requisitos de torque y velocidad pueden ser satisfechos por múltiples motores paso a paso, elige un controlador basado en las necesidades de tu sistema de movimiento: paso/dirección, programable independiente, entradas analógicas, micro-paso; luego elige uno de los motores recomendados para ese controlador.
La lista de motores recomendados se basa en pruebas exhaustivas realizadas por el fabricante para asegurar un rendimiento óptimo de la combinación del motor paso a paso y el controlador.
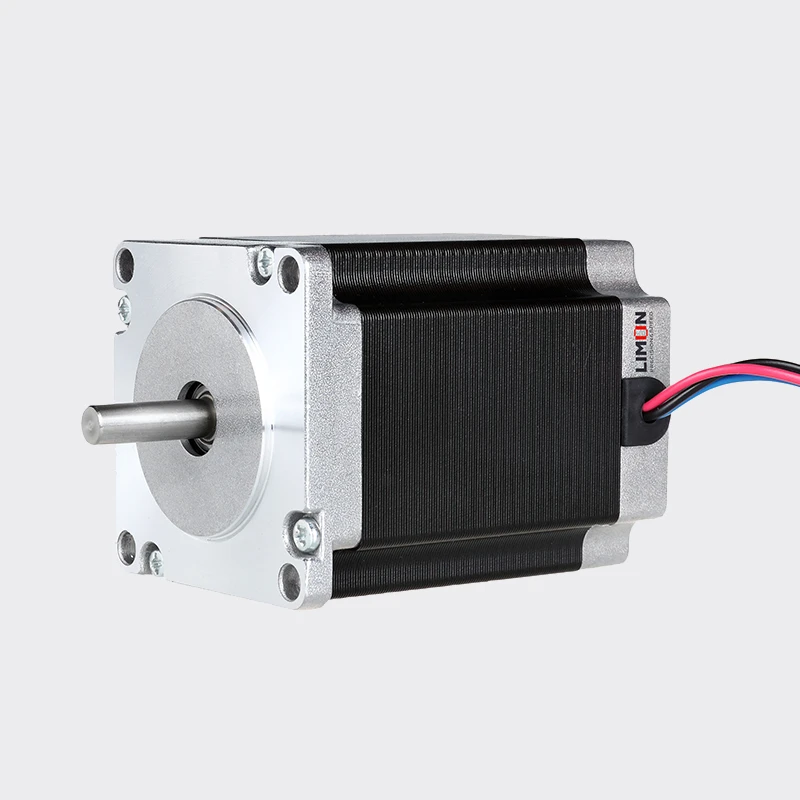
La demanda actual del mercado para motores paso a paso híbridos sigue siendo muy grande. Se utilizan ampliamente en varios equipos de automatización, como máquinas de grabado, máquinas láser, herramientas de máquina CNC, maquinaria textil y de confección, equipos médicos, equipos de medición, equipos de procesamiento electrónico, maquinaria y equipos de embalaje. En el instrumento. El motor paso a paso híbrido es un motor paso a paso diseñado al combinar las ventajas de un imán permanente y reactivo. Se divide en dos fases, tres fases y cinco fases. El ángulo de paso de dos fases es generalmente de 1.8 grados, el ángulo de paso de tres fases generalmente es de 1.2 grados y el ángulo de paso de cinco fases es generalmente de 0.72 grados.
El rotor del motor paso a paso híbrido es magnético, por lo que el torque generado bajo la misma corriente de estator es mayor que el del motor paso a paso reactivo, y su ángulo de paso suele ser menor. Por lo tanto, las herramientas de máquina CNC económicas generalmente necesitan usar un motor paso a paso de tipo híbrido. Sin embargo, la estructura del rotor híbrido es más compleja, la inercia del rotor es grande y su velocidad es menor que la del motor paso a paso reactivo.